本月上旬,由我院参与主办的第四届中国机器人行业年会在我市成功举行,包括院士专家、知名学者、卓越企业家在内的500余人汇聚一堂,展示前沿成果、探讨技术方向、共话产业发展,为我市机器人产业发展带来重要启迪。
会上,中国科学院院士丁汉做了题为《机器人化智能制造》的大会主旨演讲,演讲中向大家介绍了“2023年高端制造前沿十大科学问题”(以下简称“十大科学问题”),上述十大科学问题于今年6月在中国科学院和北京市联合举办的第五届雁栖湖会议上,经近百位高端制造领域国内外知名专家学者联合研讨后,面向全球公开发布。鉴于十大科学问题与机器人行业息息相关,现作以分享,并结合公开文献予以解读。
问题一:
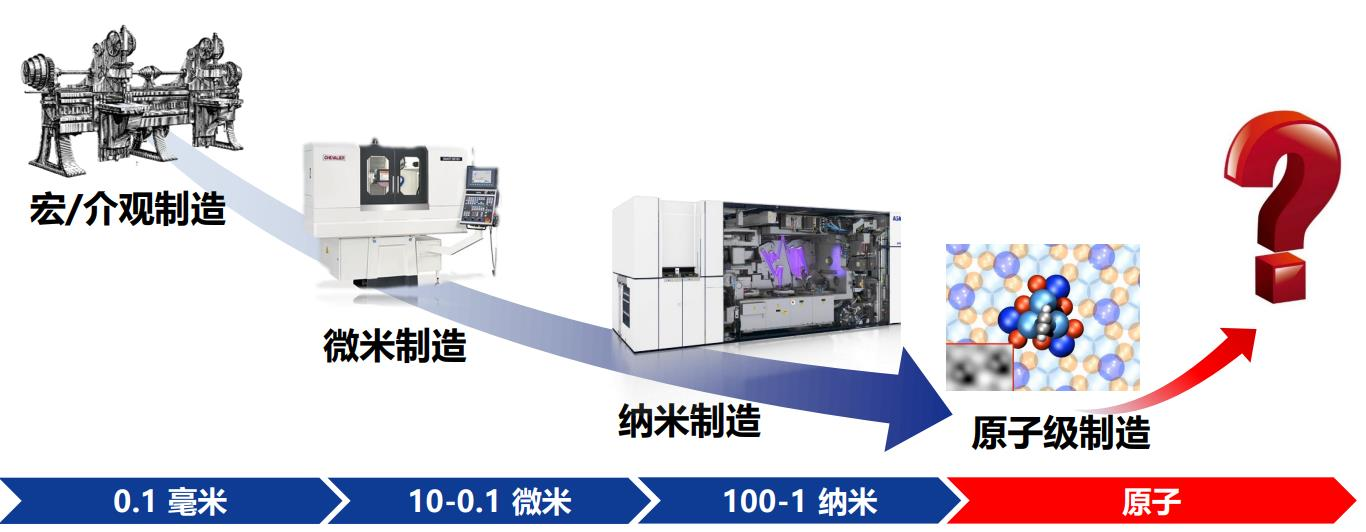
如何实现原子级可控制造? (How to achieve controllable manufacturing at the atomic scale?)
原子是物质世界中最基本的构成单元。原子级可控制造(以下简称原子制造)通过精确操纵原子及功能基元,将产品的三大特征——特征尺寸、加工精度和缺陷水平全面提升至原子级,获得比当今微纳制造性能数量级更高、逼近理论极限的产品。
原子制造具有重要意义,一方面,可以微缩器件的特征尺寸并提高制造精度,使其拥有更高的集成度和更好的性能;另一方面,可以突破分子和晶体的限制,通过对原子的精细操控来创造新分子、新材料和新器件。
目前,人类有多种技术实现原子精准操控,包括原子分子束、扫描隧道显微镜(STM)、配体包覆和原子/离子囚禁技术等;但从原子操纵走向原子制造实际应用,还需要解决大规模生产的问题。可以预见,具有原子级精度的原子制造技术将推动新科技革命的到来。
问题二:
机器人化制造如何影响未来制造范式? (How does robotized manufacturing impact the future manufacturing paradigm?)
未来制造的重要方向之一,就是通过无处不在的机器人、无处不在的传感器,实现无处不在的制造。将机器人与信息技术深度融合,将突破机器人化制造精度保障与行为顺应,变革未来制造模式。
机器人化制造利用机器人的优势,将人类智慧和知识经验融入制造活动,赋予机器人学习能力,实现非结构化环境下的制造,其科学内涵是使单个机器实现能工巧匠,多个机器实现多机协作、人机自然交互。
机器人化制造已在汽车制造、生物工程、航空制造等多个工业领域中应用。但目前大部分集中于零部件制造,而对航天器器件、高铁车厢等大型构件以及复杂曲面,实现机器人自动加工仍是各国需要攻克的难题。

问题三:
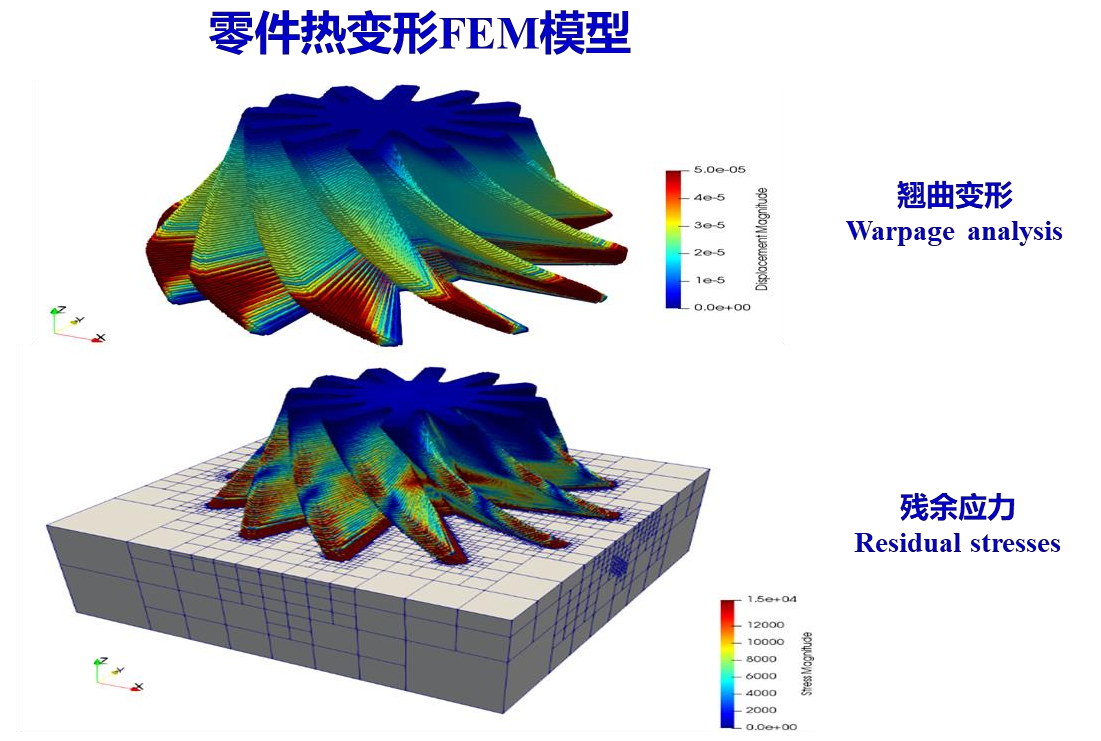
高能束增材制造如何实现精准控形控性? (How to precisely control geometry and performance in high-energy-beam additive manufacturing?)
增材制造即我们通常说的3D打印,近年来迅速发展,而以激光束、电子束为能量源的高能束增材制造技术是该领域的重要发展方向,其应用对象主要是高熔点的金属材料,包括不锈钢、铝合金、钛合金等。
控形与控性是增材制造的两个重要考察指标。要实现高能束增材制造的精准控形控性,还需要深入研究多物理场模型对构件成形几何特征和制造全过程宏微观应力、应变和变形开裂行为规律,逐点/面/体制造中非均匀、多尺度、宏微观组织-应力/应变耦合机制及主动调控机理等。
问题四:
如何基于任意元素与结构创制新物质? (How to generate new matter and materials based on arbitrary elements and structures?)
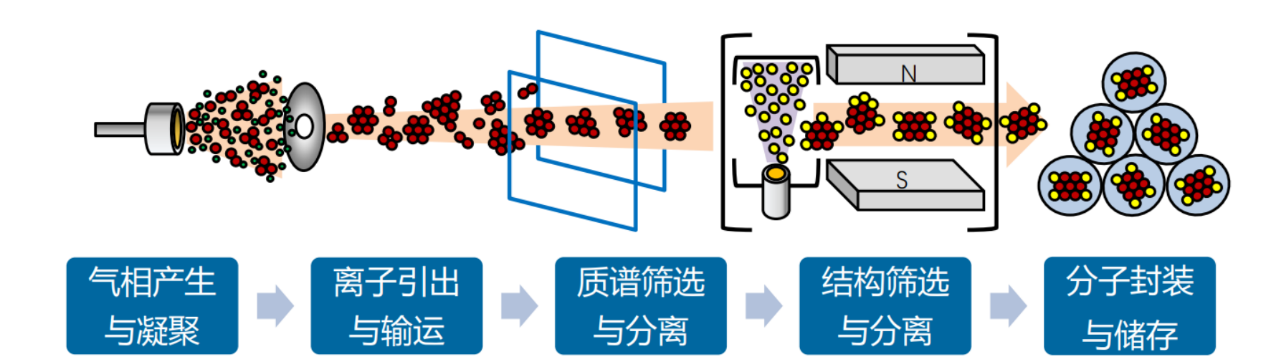
化学合成的本质是原子的重新排列组合,但传统的化学合成操作难度与实际结果都具有一定的随机性,有些材料可能几十年都无法合成。如果能在原子的组合过程中,精准控制进行、停止以及每个原子的组合排列方式,将随机合成变为主动,则基于任意元素与结构创制新物质就成为可能。
通过基于单原子、原子簇、原子层三大对象,跨越尺度、功能、效率三大鸿沟,发挥原子组装中颠覆性的性能机遇,探索新物质的按需定制,将推动人类从宏观制造走向任意元素与结构创制新物质。
问题五:
如何实现机器人类人技能作业? (How to realize human-like skills in robotic operations?)
制造的未来趋势是人机共融,其主要包括三个层次:人机空间共享、人机技能迁移和人机混合智能;后两个层次将突破机器人智能化程度,使机器人成为“能工巧匠”。人机空间共享指的是机器人与人在共同的工作空间中工作,但工作内容相互独立;在这一层次,人和机器的交互还十分有限。
人机技能迁移指的是将人类技能和知识转化为机器可理解和执行的操作的过程,通过示教-模型学习-任务复现的方式进行技能从到机器人的传递;在这一层次,机器不再简单地模仿人点对点的运动轨迹,而是具有学习和推理能力,同时也能根据环境进行诸如避障等行为。
人机混合智能则指将人类和机器的智能进行有机结合,使得机器能够协助人类完成某些任务;在这一层次,机器不再只是“工具”,而是人类工作中的“同事”,能实现人的意图识别、人与机共享控制。实现这一模式还依赖于脑机接口、虚拟现实、人工智能等技术的发展。

问题六:
极端光场制造中载能粒子的时空演化机制及效应是什么? (What are the mechanisms and effects of energy-carrier spatio-temporal evolution during extreme-light-field manufacturing?)
极端光场通常指的是具有极端波长、极端脉宽、超高频率、超强能量等特性的的特殊光场,如平均功率数百瓦量级的全固态少周期脉冲、峰值功率大于10PW的超强激光、脉宽小于100as的极紫外及软X射线阿秒激光等,其涉及飞秒精密加工、高分辨成像、激光医疗等高新技术产业。
极端光场制造将提高加工制造的精度和速度,为推动消费电子、新能源等制造业产业发展提供巨大动力。当前,极端光场制造中载能粒子的时空演化机制及效应尚需要深入研究,包括超快超强极端光辐照中光、热、电、磁、力学性能的多尺度演变规律,激光与材料相互作用中电子弛豫、电荷转移、能量传输、电子输运过程的影响规律,非线性非平衡态光子-电子-激子-声子-离子相互作用等。

问题七:
如何实现异质异构跨尺度制造? (How to achieve heterogeneous cross-scale manufacturing?)
异质异构跨尺度制造是指多种材质、多种结构、多种尺度及多物理之间的融合制造。当前亟需探究跨尺度界面融合机理与高效调控机制,以实现高可靠异质异构跨尺度集成,相关研究需要考虑多方面因素,包括热、力、电、磁等多物理场的耦合作用、各材料间的相互影响、多功能协同的可靠性等。
目前一典型的例子是芯片异质异构集成技术。该技术将不同类型的芯片、器件或材料封装在同一微系统下,不同的芯片、组件可以拥有不同的功能、制程和特性,其脱离了不断缩小工艺尺度以提升性能的框架及约束,而是通过集成与技术融合来实现芯片性能的大幅提升。这一新技术正在成为国内外芯片发展的重要技术路线。

问题八:
如何实现性能驱动的高附加值制造? (How to achieve performance-driven high-value added manufacturing?)
未来的制造不仅关注传统意义的制造效率和精度,更加关注制造产品的性能。性能驱动的高附加值制造即以产品的性能指标为驱动,优化和控制制造过程中的关键工艺,从而提升制造的附加值,性能指标的有效评价及工艺知识溯源则是其中的关键技术。
首先,需要建立有效的性能指标评价体系,包括制定详细的测试计划、设计合理的测试方法、对测试结果进行分析和评估等。在明确了性能指标后,通过选择合适的材料、确定合理的加工参数、优化装配流程等进行产品的优化设计。
此外,需要对制造过程中涉及到的工艺知识进行溯源,包括对制造过程中的各个环节、各个组件进行分析,找出可能影响产品性能的关键因素,并通过优化关键因素优化制造过程,从而提升产品的整体性能。

问题九:
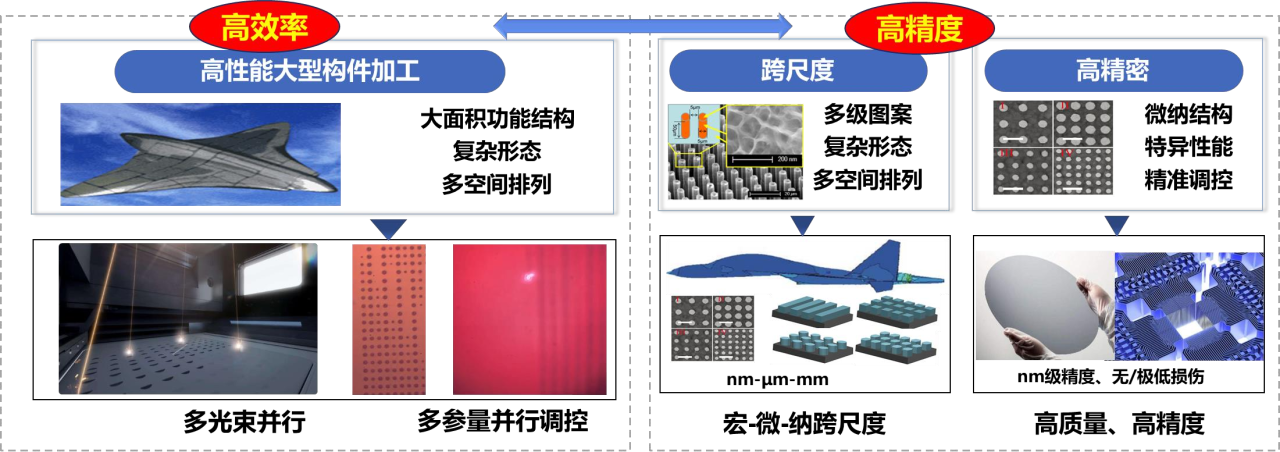
如何实现高效高性能多尺度激光制造? (How to realize simultaneously high efficiency and high performance in multi-scale laser manufacturing?)
激光制造技术具有加工精度高、适用材料多、损耗变形小、易于自动化集成等优势,在航空航天、国防军事、新能源汽车、生物医疗等领域中被广泛应用,被称为“未来的万能加工工具”,具体包括激光焊接、激光切割、激光抛光、增材制造、微纳加工等。
随着制造品质需求的不断提升,如何满足高效率、高精度、跨尺度的加工要求成为激光制造的主要研究方向。在理论方法方面,需要通过探究激光辐照中光、热、电、磁、力学性能的多尺度演变规律,揭示激光-材料相互作用机制和材料-结构-功能一体化形性耦合调控机理,从而发展出高效率、高性能的宏微纳多尺度制造机理及方法;在应用技术方面,需要开发更高性能的激光制造设备以提升激光制造的效率和质量,并研究最佳制造工艺条件。
问题十:
如何实现面向未来制造的机器人系统? (How to realize future manufacturing robot systems?)
未来的制造可以上天入海,可以适应超大尺度和狭小空间,因此面临更加复杂和多样化的挑战,需要机器人系统具备更强的灵活性,“测量-操作一体化”、“人-眼-脑协同”,以应对复杂多变的作业环境。
为此,未来机器人系统需要具备刚-柔耦合的灵巧结构,刚性结构可以提供稳定的支撑和定位,而柔性结构可以适应各种形状和尺寸的变化;需要具备认知引导的多模感知能力,包括视觉、听觉、触觉等方面的感知能力,从而更好地理解和感知周围环境以做出更准确的决策和操作;需要具有自由组合的集群操作能力,以实现多机器人相互配合,协同实现更高效、更精确的制造过程。