我院高压输变电安全监测与智能运维研究中心长期深耕在电力监测领域,面向风电行业日益增长的叶片表面缺陷快速复核需求,团队成员围绕长焦成像、多模态协同感知与工程化部署开展持续研发,已完成风电叶片智能检测初代样机开发与测试验证,形成了面向重点区域快速复核与影像留证的阶段性成果。相关工作不仅着眼于当前风电场高频复核需求,也面向未来无人车、无人船搭载及深远海场景应用开展前瞻布局。
一、聚焦风电领域智能无人检测系统
随着风电运维需求不断提升,叶片表面裂纹、破损、污染、雷击痕迹、前缘损伤等问题,越来越需要快速确认、快速留证和快速复拍。相比一次性的大范围巡检,风电场在很多实际场景中更需要的是围绕重点机组、重点区域和重点问题开展高频复核的能力。
围绕上述需求,研究团队已完成风电叶片智能检测初代样机以及配套的软件、算法平台的研发,并开展了相关测试验证。从当前定位看,该系统为风电场提供一种更轻量、更高频、更易进入日常运维流程的复核工具。其价值不仅在于“能拍到叶片”,更在于逐步形成从现场快速采集到影像留存、结果输出和后续比对的能力基础。

图1:风电叶片智能检测初代样机

图2:风电叶片智能检测系统机组级管理界面示意
二、1分钟完成重点区域采集,效率提升更具象
在当前测试条件下,针对单台风机重点区域复核场景,研究团队当前方案的现场采集时间约为1分钟。作为对比,无人机停机巡检通常需要约30分钟,人工攀爬/绳索作业通常需要约3–4小时。
这意味着,在重点区域快速复核任务中:
相较无人机方案,现场采集效率可提升约30倍;
相较人工攀爬/绳索方式,现场采集效率可提升约180–240倍。
这一能力尤其适合用于台风前重点机组预检查、台风后快速复核、异常告警后的局部确认、疑似缺陷点二次确认,以及维修前评估和维修后验收等场景。
三、围绕动态叶片场景,构建多模态智能检测能力
围绕风电叶片高速运动、远距离成像和复杂光照条件下的快速复核需求,研究团队从系统角度构建了面向动态场景的智能检测能力。当前初代样机以长焦高质量可见光成像为核心,融合激光反馈信息、边缘控制与多模态数据协同分析能力,重点提升目标区域捕获、成像控制与结果输出的一体化水平。
针对逆光、强反差、云层变化等复杂光照条件,系统可基于塔筒顶部机舱等相对稳定区域开展自动光学模块校准,对曝光、白平衡、快门等关键参数进行自适应调整,从而提高后续叶片图像采集的一致性与可用性。
同时,针对叶片持续运动、有效采集窗口短的特点,系统引入了多传感元件高灵敏度响应机制,通过传感反馈与成像控制协同,提高对关键采集时机的快速响应能力,为高质量标准化采集、后续AI分析和自动化任务执行奠定基础。

图3:自动光学模块校准与多模态信息采集流程
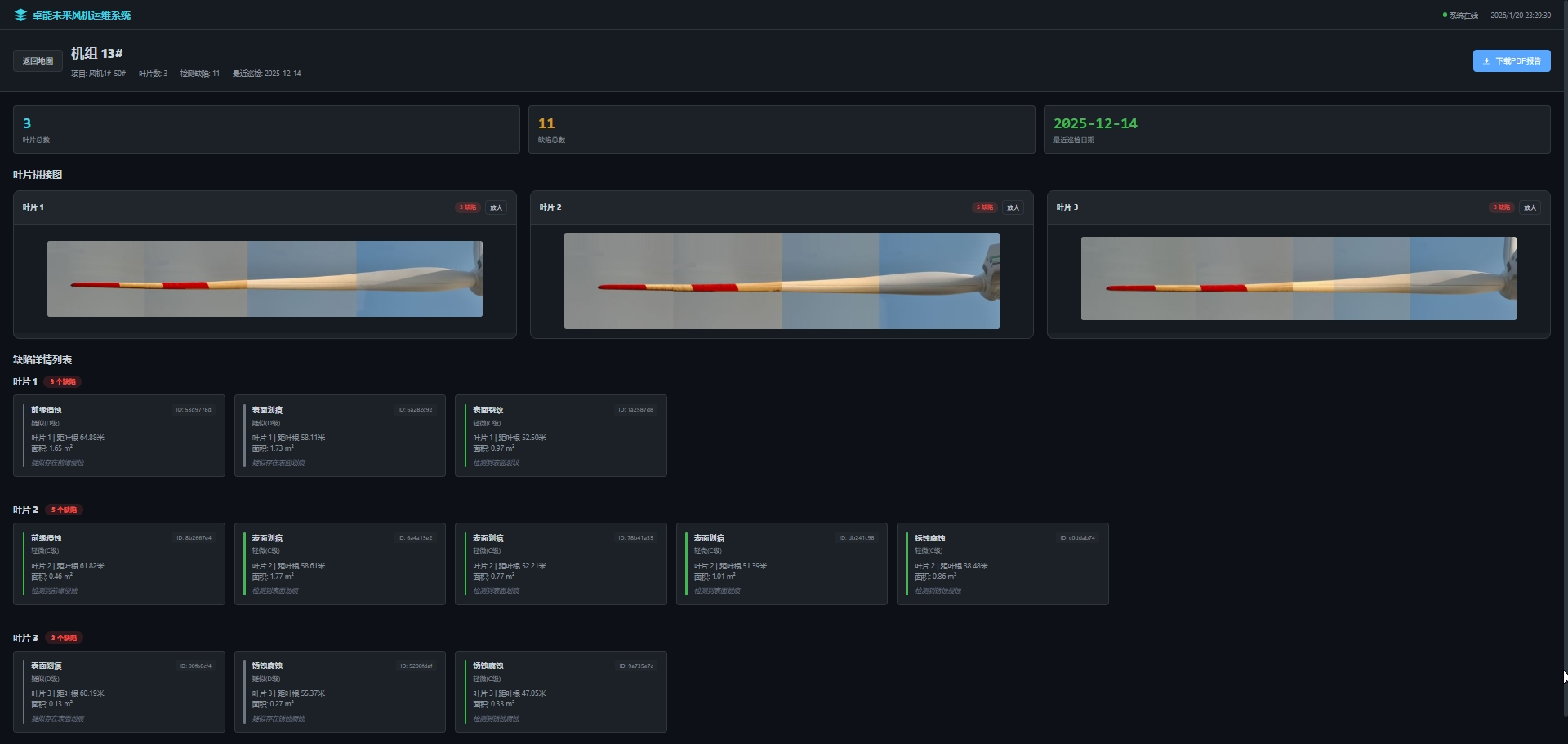
图4:面向叶片缺陷复核的拼接总览与结构化结果输出示意
四、当前行业现状及项目优势
传统无人机在风电行业中仍然有其明确价值,尤其在全量巡检和广域巡视中具备成熟应用基础。研究团队当前路线并不是否定其作用,而是针对另一个更加高频、更加注重响应速度和执行成本的细分任务,提出差异化方案。
当客户需要的是“快速确认一个重点区域是否存在问题”“在不影响发电的情况下做一次局部复核”“对台风或其他异常天气事件前后进行标准化留证”时,更轻量、更快、更低组织成本的方案,更容易进入日常运维流程。
该项目在重点区域快速复核场景下,地面/载体巡检路线的核心优势在于低停机依赖、低组织成本、低等待成本和高频执行能力。
五、面向无人车、无人船与深远海应用持续演进
在此基础上,研究团队并未将当前成果仅仅定位为一套单点设备,而是将其视为未来风电无人化巡检体系的一个入口。当前针对叶片表面快速复核形成的能力,后续将进一步向无人车、四足机器人、无人船搭载方向演进,推动检测系统从人工携带和现场部署,逐步走向自主移动、自主执行和无人化巡检。其最终目标之一,是面向风电场特别是海上风电场景,构建能够持续执行巡检/复核任务的自主化检测系统。
这一前瞻方向与风电行业向深远海发展的趋势高度契合。随着海上风电持续向更远海域布局,运维半径扩大、作业环境更复杂、现场人员和船机组织成本更高,传统依赖人工近距离接触或空中短时作业窗口的方式,将面临更大挑战。相比之下,基于地面或海面载体搭载的多模态感知系统,在长期运行、频繁执行、复杂环境适应以及无人化协同方面,有望展现出更强的持续价值。也正因如此,研究团队当前的工作不仅是在解决一个眼前的复核问题,更是在为未来深远海风电无人化运维探索一条更具可持续性的技术路线。
下一步,研究团队将继续依托研究平台,围绕风电叶片快速复核这一高频入口场景,持续推进系统优化、场景验证和合作拓展。围绕无人车、无人船搭载和深远海应用方向,开展更具前瞻性的系统布局与联合验证。团队希望通过持续研发和产学研协同,推动相关成果从阶段性样机走向更具行业价值的工程化应用,为风电运维数字化、智能化和无人化提供新的技术支撑。