智能跨域机器人应用研究中心(AI-CDR Center)是一支聚焦“具身智能 + 跨域系统”的工程化攻坚团队。中心面向国家重大战略需求,致力于解决极端非结构化环境(Extreme Environments)下的作业难题。针对高危(特高压/核电)、高难(跨域协同/精细操作)、高负荷(重复枯燥)的“三高”场景,中心深度融合AI大模型与机器人技术,打造“具身智能特种机器人”,实现从“人工作业”向“智能无人作业”的跨越。

李晓文,哈尔滨工业大学工学博士,高级工程师。现任浙江大学湖州研究院特聘研究员、中国计算机学会(CCF)智能机器人专业委员会执行委员。长期致力于具身智能与计算力学的前沿交叉研究,首创物理监督深度学习优化算法(PSDLO),并在《Nature Communications》、《PNAS》等国际顶级期刊发表学术论文21篇。曾主持国防173计划等国家级重点科研项目,拥有4项PCT国际专利及3项国内授权发明专利。主导完成了国网特高压机器人、两栖变形无人机等多个国家级、省级重点项目。成功研制出国内首套特高压线路具身智能双臂作业机器人及国内首个智能康养机器人,实现了从前沿理论创新到高端装备落地的重大跨越。
袁笠懞,研究中心副主任,中国汽车工程学会会员,威海市慈善总会小蜗公益基金理事长。近五年主导开发并交付多项涵盖ToB(企业)、ToG(政府)及ToC(消费)端的复杂工业工程软件与消费电子支撑系统。主导东莞松山湖国际机器人研究院卒中偏瘫运动康复项目。

1、具身智能与自主决策:开发具备“感知-决策-执行”一体化能力的AI智能体,让机器人在高危复杂环境中实现自主作业。
2、特种机器人系统工程:针对特高压带电作业、核电运维等极端场景,研发抗强干扰、高精度的特种作业机器人。
3、海陆空跨域无人系统:突破单一场景限制,研发具备陆空、水空模态切换能力的变形机器人,实现全地形无死角覆盖。
4、集群协同与数字孪生:构建多机器人协同控制平台,通过数字孪生技术实现对异构机器人集群的超视距实时调度。

1、国内首套:特高压带电作业具身智能机器人
成功研制出适用于特高压多分裂导线作业的双臂具身智能机器人。突破了强电磁环境下的机械臂柔顺控制与超视距低延时通讯技术。替代人工进行销子级精细化操作,从根本上解决了特高压运维中“高风险、高强度”的痛点。人民网报道:
http://zj.people.com.cn/n2/2025/1112/c370990-41409295.html?jump_from=1_05_37_01
2、市政巡检:城管服务机器人
研发城管服务机器人,融合文化IP与顶尖具身智能。搭载车规级雷达、7自由度灵巧手及无人机平台,具备AI全息感知、自主补能及应急协作能力。通过“空天地”立体协同,解决城市复杂场景下的精细化治理难题。

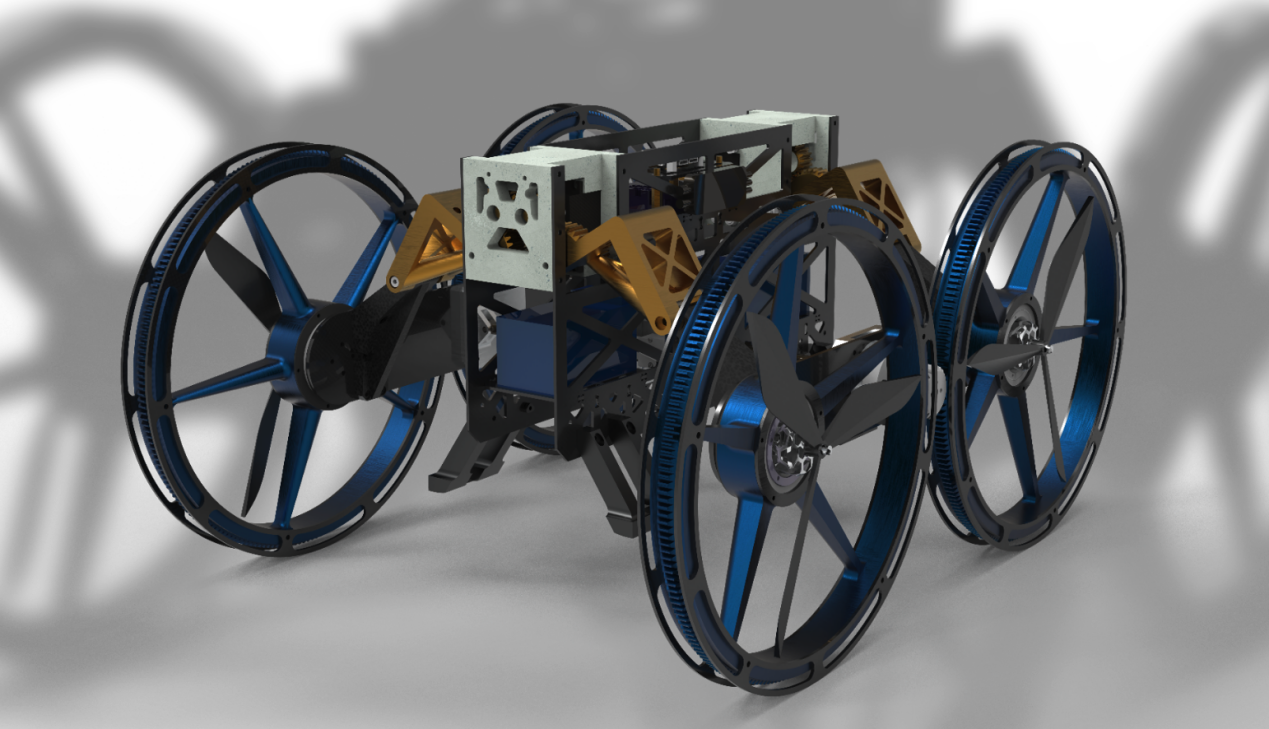
3、陆空两栖:可变形跨域巡检机器人
两栖无人机负责人王杰涵,带领团队研发了具备“飞行+轮式”双模态切换能力的创新型机器人。通过机械结构的巧妙变形,在地面/表面行走模式下大幅延长续航,在障碍物面前自动切换飞行模式。第二代产品已实现小批量交付,在复杂地形勘探与机器人教育领域展现巨大潜力。
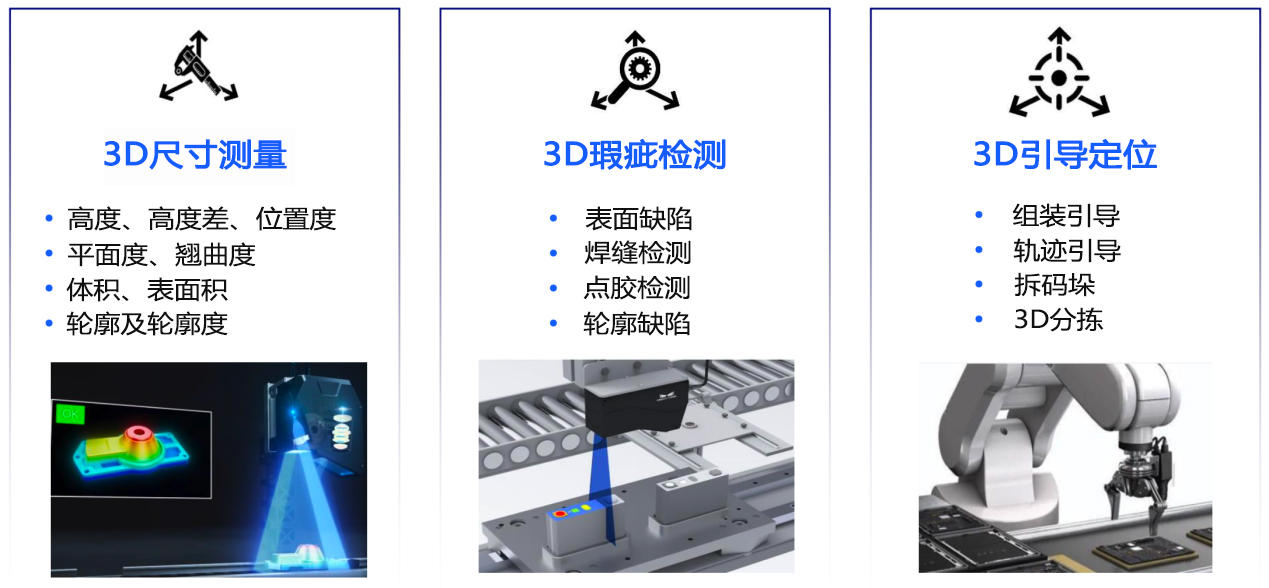
4、工业赋能:高精度AI视觉与机器人控制系统
依托自研算法平台,深度融合3D视觉、AI深度学习与双闭环运动控制技术,实现了从“微米级感知”到“毫米级执行”的技术闭环。系统具备±1.5μm超高精度测量、3D机器人引导及复杂曲面缺陷识别能力。已在汽车及半导体产线落地,成功攻克PCB残胶、精密贴合等高难度工艺痛点,以全栈技术赋能高端智造。

1、智慧电网:特高压输电线路的销子级带电检修、绝缘子精密维护、异物清除及全天候无人化智能巡检。
2、智慧城市与综合治理:基于机器人的市容AI巡查(违停、占道、垃圾识别)。利用“空天地”协同技术,进行复杂地形下的应急救援勘探与地下管廊巡检。
3、高端智能制造:半导体及PCB制程中的微米级缺陷检测与精密贴合。汽车零部件的高精度喷涂、装配,以及基于3D视觉的复杂曲面引导质检。
4、科研与教育:为高校及科研机构提供基于具身智能的高性能特种机器人二次开发平台。

科技发展部 徐老师 15715888778(微信同号)