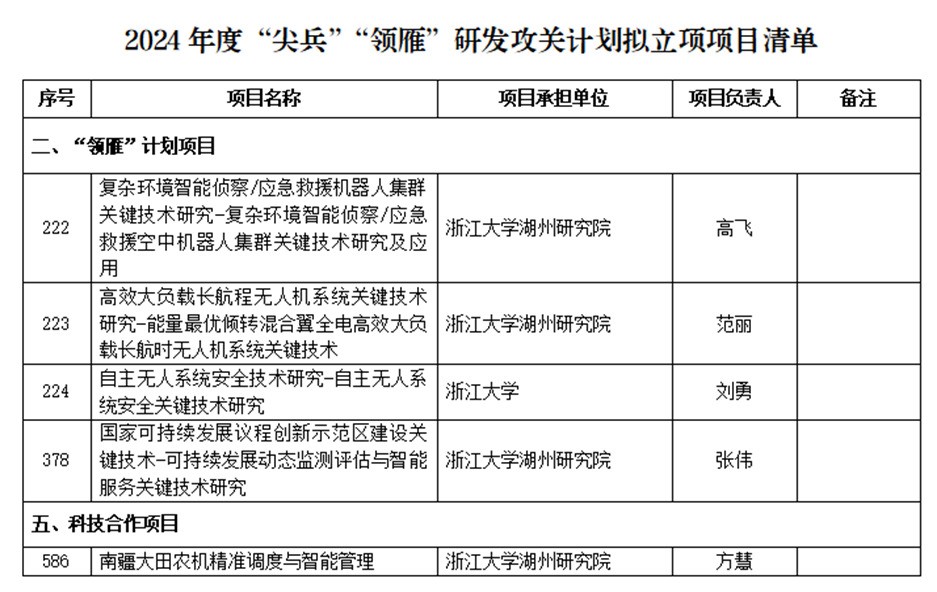
12月24日,浙江省科学技术厅2024年度“尖兵”“领雁”研发攻关计划项目立项公示结束,我院成功牵头3项、参与1项“领雁”计划项目,牵头1项科技合作项目。
项目一
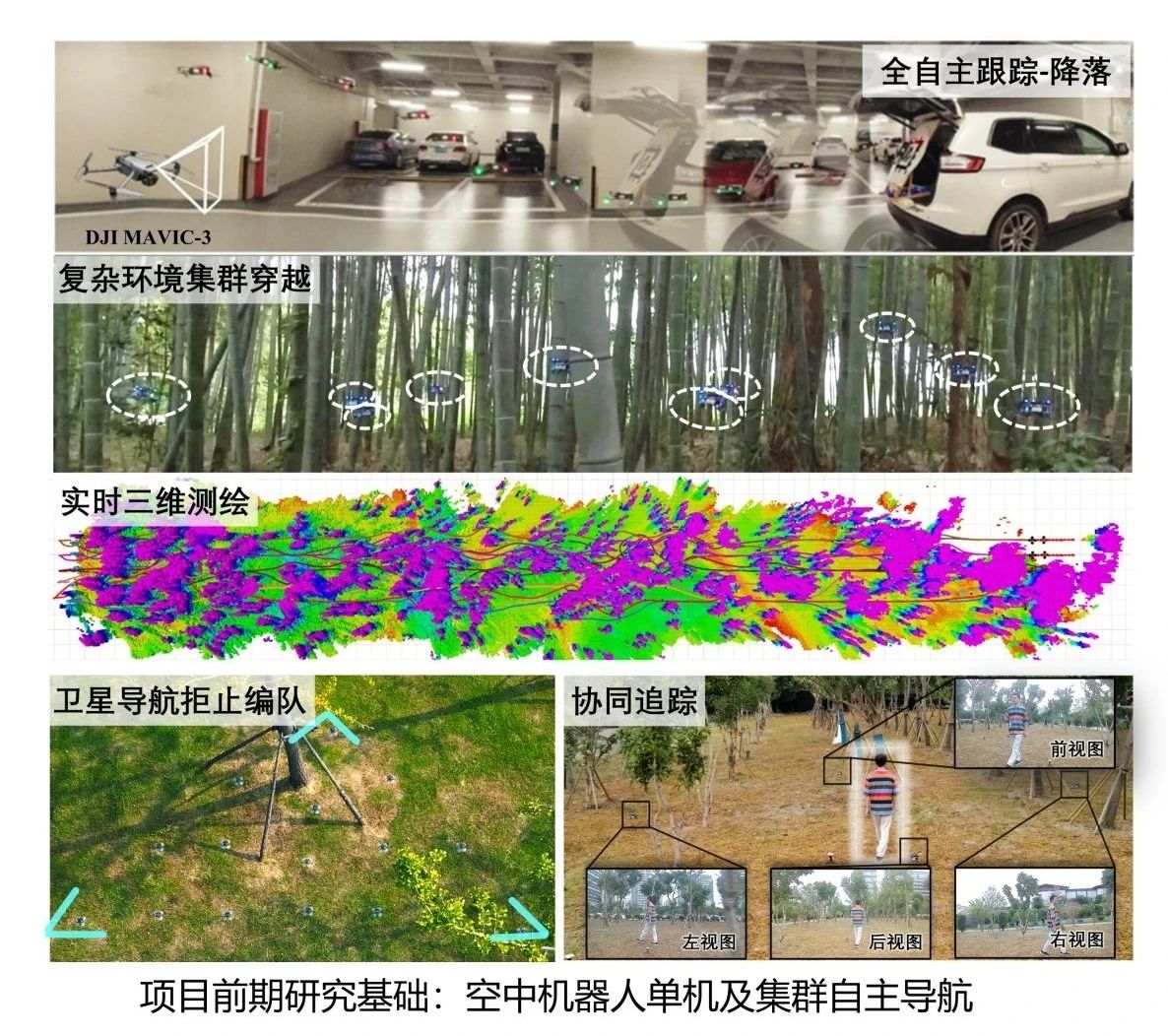
复杂环境智能侦察/应急救援空中机器人集群关键技术研究及应用(“领雁”计划项目-牵头)
该项目针对复杂丛林/密集建筑等复杂环境下的智能侦察/应急救援等需求,以空中机器人为研究对象,以卫星拒止环境下的集群自定位与互定位方法、高可靠实时自主导航与智能避障、大规模集群无人机运动规划决策与控制、环境主动感知的快速目标搜寻与识别为核心研究内容,旨在突破集群关键理论与技术难点,研发新型通用模块化智能侦察/应急救援空中机器人平台,提升集群机器人智能性、协同性、鲁棒性,并实现大规模空中机器人集群在复杂未知环境下的智能侦查、应急救援等场景下的实际部署。
项目二
能量最优倾转混合翼全电高效大负载长航时无人机系统关键技术(“领雁”计划项目-牵头)
本项目设计提出采用能量最优倾转、全电推进和可重构混合翼的创新智能全电飞机,具有不依赖于机场跑道和燃料存储设施条件的、可敏捷机动起降的大范围巡查巡检、物资运送的能力,重点突破面向百公斤级推力高效电动推进技术、飞行器结构机构轻量化与气动布局优化研究、自主飞行智能感知技术与精准定位方法研究以及强扰动无人机自主导引降落技术研究,使得无人机具有极高的飞行稳定性、优异的操纵性和大航程续航、大区间航速、智能感知、精准定位和飞行控制能力以及精准的自主降落能力,确保无人机能够全自主飞行和任务执行。

项目三
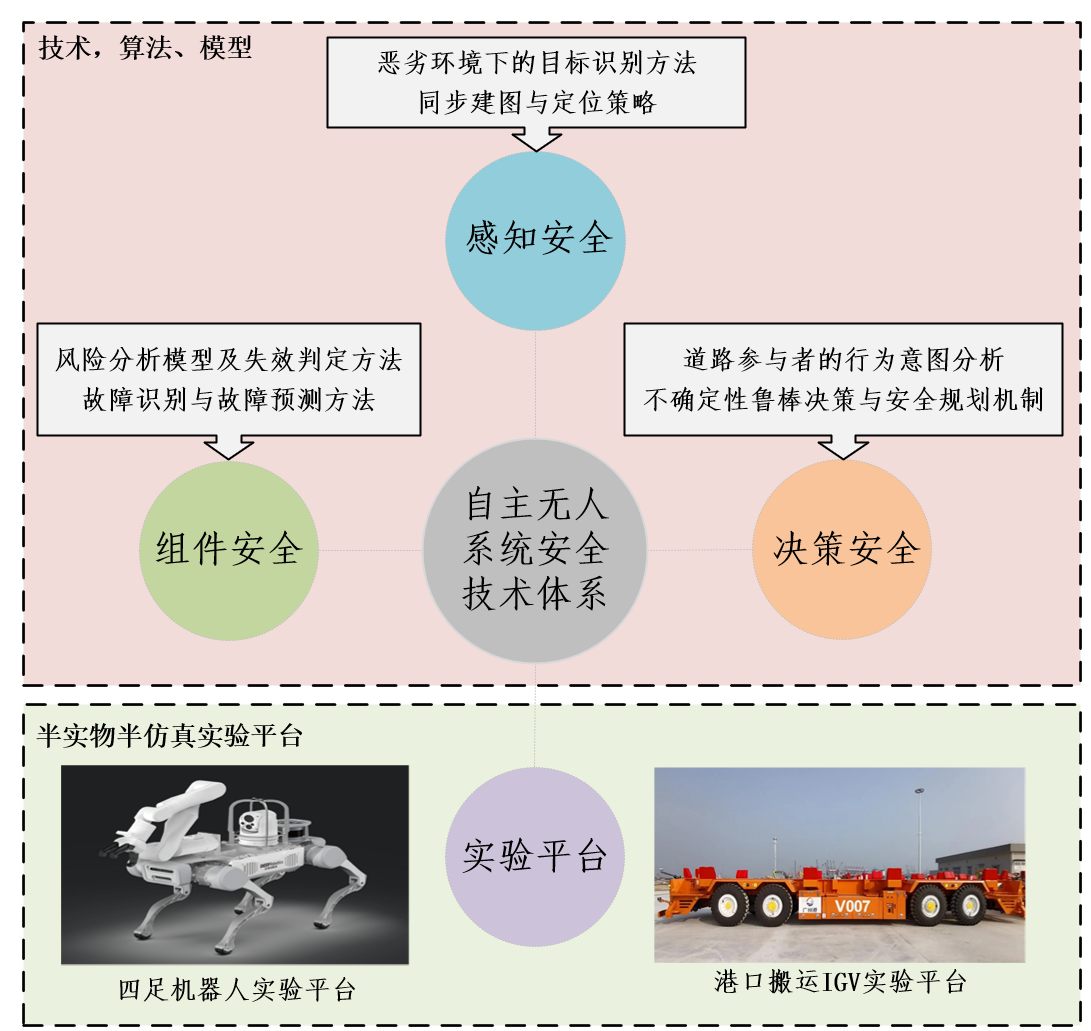
自主无人系统安全关键技术研究(“领雁”计划项目-参与)
本项目针对自主无人系统的安全评估问题,从硬件装备、感知系统、决策规划、仿真建模以及应用部署几个方面开展研究,研究自主无人系统安全风险评估方法,构建安全风险评估体系;研究基于多源信息融合的高安全感知系统,提升复杂场景下无人系统感知可靠性与安全性;研究自主无人系统安全性决策方法,构建底层安全性约束;研究基于数字孪生的自主无人系统建模方法研究,开发具有机理真实性、决策安全性、迁移可靠性的自主无人系统建模方法;研究自主无人系统安全性部署保障研究,在港口、有色金属等重载物流搬运场景下开展典型示范应用。
项目四
可持续发展动态监测评估与智能服务关键技术研究(“领雁”计划项目-牵头)
该项目面向湖州国家可持续发展议程创新示范区建设需求,构建既对标国际可持续发展目标,又充分反映浙江优势、湖州特色的指标库,建立示范区评价指标体系与绿色低碳可持续发展指数;攻克示范区卫星遥感、“市-县-乡镇”多空间尺度与“环境-经济-社会”多维时空信息相融合的监测评估时空计算系列关键技术;建立可持续发展目标(SDGs)评估监测与智能服务平台,并面向湖州全域开展应用,助力湖州可持续发展;完成落实联合国SDGs的ISO国际标准提案,研制城市可持续发展相关的国家标准,提出绿色创新驱动可持续发展理论,形成示范区可持续发展路径决策咨询报告与典型案例集,为其他国内外生态资源富集型地区实现可持续发展提供先进经验。
项目五
南疆大田农机精准调度与智能管理(科技合作项目-牵头)
该项目针对农机管理、农田管理、农机作业管理脱节的问题,以农田管理为核心,建立支持农田地块、农机服务信息、农机作业信息的协同管理系统平台。从农机调度的实际场景出发,抽象出带时间窗农机调度模型,综合考虑空间因素、时间因素、农田作业点因素、农机库及农机因素,同时优化多个目标,引入综合调度成本函数,通过对农机调度问题的影响因素、约束条件及调度目标的分析,建立农机调度问题的数学模型,形成形成农机作业、平台监管的新模式及流程,最后实现农机资源及农田资源的自动化、智能化、精准化与统一化的分析与管理。
“尖兵”“领雁”研发攻关计划由省级财政资金设立,面向世界科技前沿、面向经济主战场、面向国家和浙江重大需求、面向人民生命健康,开展重点技术领域的前沿科学问题研究、重大关键核心技术攻关、重大社会公益性研究、重大国际科技合作等研究活动的科技计划,旨在解决一批关键核心技术和科技瓶颈问题,推进科技高水平自立自强。入选“尖兵”“领雁”计划不仅彰显了研究院在科研研发攻关、科技创新的综合实力,也为研究院接下来申报国家级应用型科技项目打下了坚实的基础。