5月4日,浙江大学控制科学与工程学院FAST LAB(无人系统与自主计算实验室)与浙江大学湖州研究院IMU团队(智能移动无人系统技术浙江省工程研究中心)在国际顶级期刊《自然·机器智能(Nature Machine Intelligence)》发表题为“Recurrent graph optimal transport for learning 3D flow motion in particle tracking”的研究论文,创新性地提出面向三维层析粒子跟踪测速的图神经网络框架GotFlow3D,将人工智能、最优传输、流体力学等学科交叉结合,为湍流可视化测量数据的智能解析提供了新的研究思路和技术手段。论文第一作者是控制学院直博生梁家铭(2023年3月毕业),通讯作者是控制学院教授许超和百人计划研究员蔡声泽。
论文链接
https://www.nature.com/articles/s42256-023-00648-y
自然界存在形形色色的飞行和游弋生物,如何通过翅膀扑动和身体摆动来获得推动力,背后蕴含着深刻的力学原理。但环绕在运动体周围的水和空气无形无色,如何探究生物或机械结构运动时产生的复杂流动行为呢?研究团队融合多场光学成像、测控系统、数据解析、可视计算以及人工智能等多个方向,形成流场成像与智能学习(Fluid Imaging and Learning Machines,FILM)交叉前沿技术手段,为观测流体介质演化和理解数据背后力学带来新的工程研究视角。
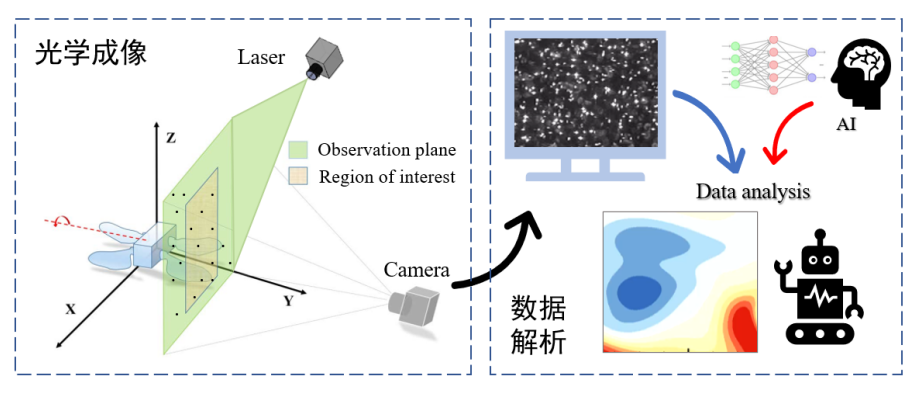
粒子测速原理示意图
光学成像、数据解析、可视计算、人工智能及控制的集成系统
实验流体科学家引入层析粒子跟踪测速(PTV)实验,借助跟随性强、能够吸收特定波长的荧光示踪粒子,利用示踪粒子在多视角下的投影成像信息重构三维粒子空间分布,再通过跟踪匹配时间序列的示踪粒子,还原流体运动的时空演化信息,以非接触方式实现全局复杂流动现象可视化,让湍流、漩涡等复杂流动结构“现出原形”。
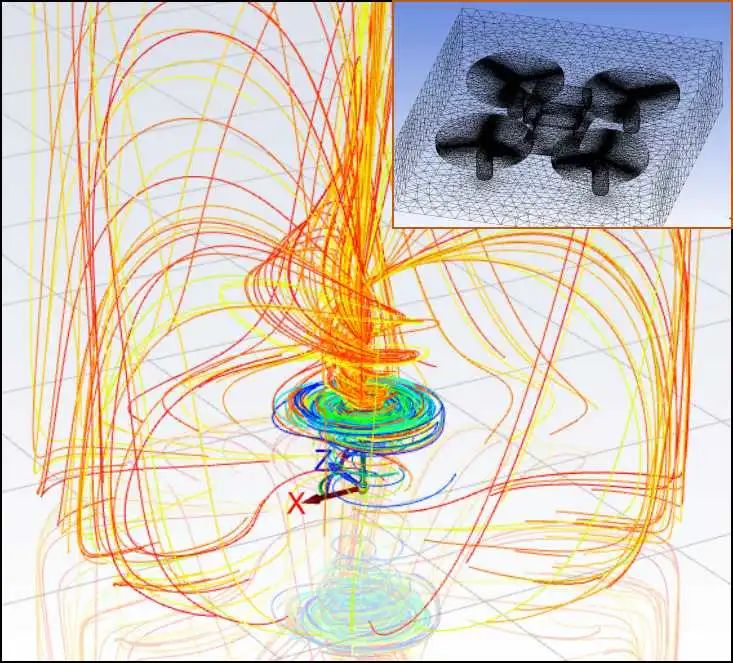
偏振片模拟鱼尾摆动产生的流场 旋翼飞行器仿真产生的流场用于研究地面效应
长期以来,粒子跟踪测速技术在流动现象的研究中发挥重要作用。但微尺度颗粒视觉差异几乎可忽略不计,且高密度粒子群伴随流体运动时交错混迭,根本无法借助传统的颗粒视觉识别与运动预测手段来建立粒子团运动的时空对应关联关系。因此,如何实现高浓度大规模粒子分布、大动态速度范围等场景中的双帧粒子分布匹配,是粒子跟踪测速领域长期存在的挑战之一。
针对上述问题,研究团队借助刻画茫茫星空的“星座(Galaxy)”这一个概念,融合图网络和最优传输理论(Optimal Transport是现代数学前沿分支,2010年与2018年两次获菲尔兹奖),解决了湍流可视化大规模示踪粒子群匹配的定量刻画难题,原创性地提出了深度循环神经网络GotFlow3D,从时序三维粒子集合中重构三维流场运动,打造出面向复杂流场观测的普适“数学智能显微镜”。
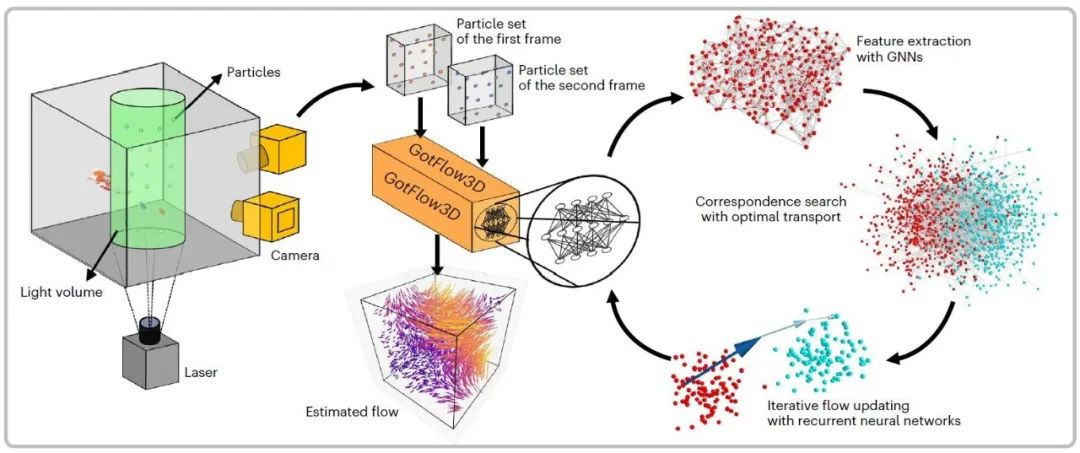
图:粒子跟踪测速实验与GotFlow3D基本思想
该方法通过三维粒子空间坐标构造图结构,以静态和动态图神经网络结合的方式学习粒子分布的多尺度特征,并依据最优传输思想挖掘两帧粒子之间的匹配关系。与基准神经网络方法相比,GotFlow3D在不同的测试场景中均获得更高的粒子运动估计精度,同时,GotFlow3D与传统粒子跟踪测速算法结合,能够极大提高复杂场景下粒子跟踪匹配的精度和可靠性。该研究工作所实现的高精度、高浓度粒子运动估计与跟踪测速算法,有助复杂流动现象机理探索和仿生流体机器人设计,为航空、海洋等领域的高端装备研发提供智能流动建模新手段。譬如,FAST LAB与浙江大学能源学院吴迎春课题组(湖州研究院热流成像与感知工程研究中心)开展合作,围绕国产旋翼、固定翼飞机高空高海拔航空发动机低温旋流雾化燃烧多相反应流场三维测量、飞行云雾颗粒场可视化测量以及机翼大尺寸流场测量这一系列迫切需求,结合粒子图像测速、颗粒全息成像、光散射干涉成像等多模态计算成像技术,研究深度学习与机理模型的混合人工智能手段实现流场大数据解析,为解决低温高速极端工况下飞机发动机快速启动、高空结冰云雾探测难题提供关键技术支撑。
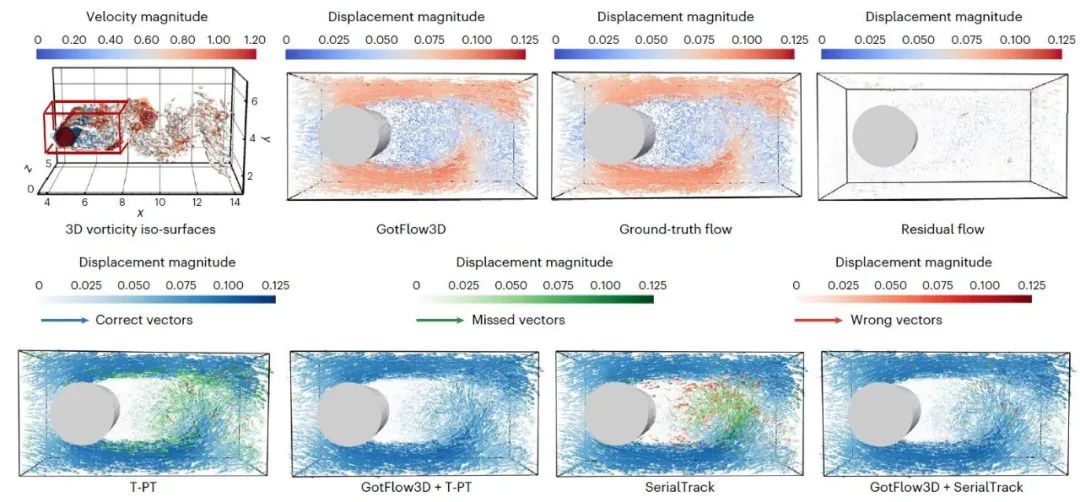
GotFlow3D实现高精度粒子运动估计并增强粒子跟踪匹配效果

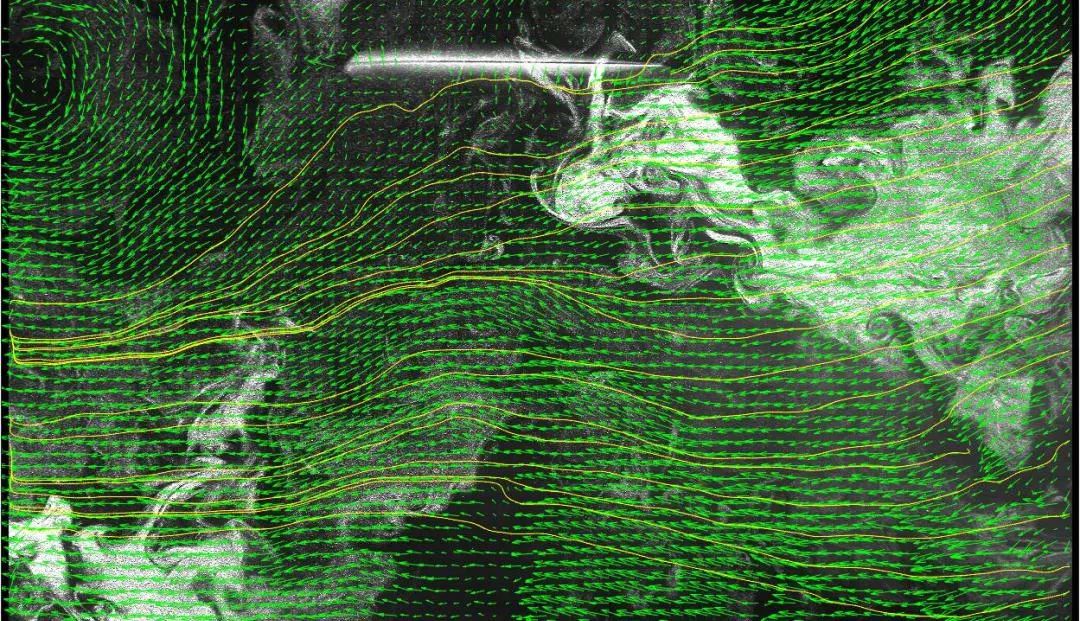

图:应用场景 – 飞机云雾颗粒全息成像测量实验
FAST LAB
主要科研方向
智能无人系统自主导航与规划、多物理场成像与智能学习、机器学习的控制论方法。该论文是FAST LAB自去年5月份在《科学·机器人(Science Robotics)》刊登“全自主集群飞行机器人”封面论文后又一重要进展;也是继刚发表《美国科学院院刊(PNAS)》论文后课题组在流体智能成像与深度学习方面又一重要突破。
论文链接:
https://www.nature.com/articles/s42256-023-00648-y
论文作者:
梁家铭:本文第一作者,浙江大学控制科学与工程学院直博生,2023年3月毕业后加入阿里达摩院
许 超:本文通讯作者,浙江大学控制科学与工程学院教授、浙江大学湖州研究院院长
蔡声泽:本文通讯作者,浙江大学控制科学与工程学院百人计划研究员

许超(左)、梁家铭(中)、蔡声泽(右)
下一篇:微型燃气轮机产业化项目