


产研携手破局!冷等离子宠物护理仪,重构科学养宠新生态
当养宠从“陪伴需求”升级为“精细化健康管理”,宠物护理市场正迎来千亿级增长浪潮。数据显示,中国宠物医疗器械市场规模预计2030年将突破千亿元,年复合增长率超15%,其中智能、安全、多功能的日常护理设备成为需求新风口。然而,市场现存产品多陷入“单一功能”困境,杀菌依赖化学药剂伤肤、除臭效果短暂、护理与保健脱节等痛点,亟待技术创新打破僵局。






当养宠从“陪伴需求”升级为“精细化健康管理”,宠物护理市场正迎来千亿级增长浪潮。数据显示,中国宠物医疗器械市场规模预计2030年将突破千亿元,年复合增长率超15%,其中智能、安全、多功能的日常护理设备成为需求新风口。然而,市场现存产品多陷入“单一功能”困境,杀菌依赖化学药剂伤肤、除臭效果短暂、护理与保健脱节等痛点,亟待技术创新打破僵局。

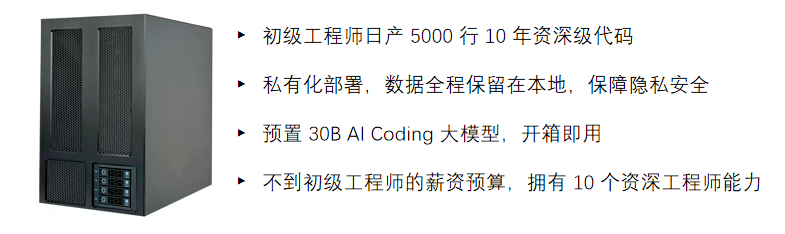
我院智能安全芯片与系统研究中心传来最新科研突破,团队研发的自研高效压缩算法与OpenClaw工具链实现原子化深度融合,成功破解大模型私有化部署“成本高、门槛高、操作难”的行业痛点,为企业数字化转型提供了开箱即用的高性能私有AI解决方案,助力企业轻松实现AI私有化“一键上车”,彰显了研究院在智能数字应用领域的前沿创新实力。
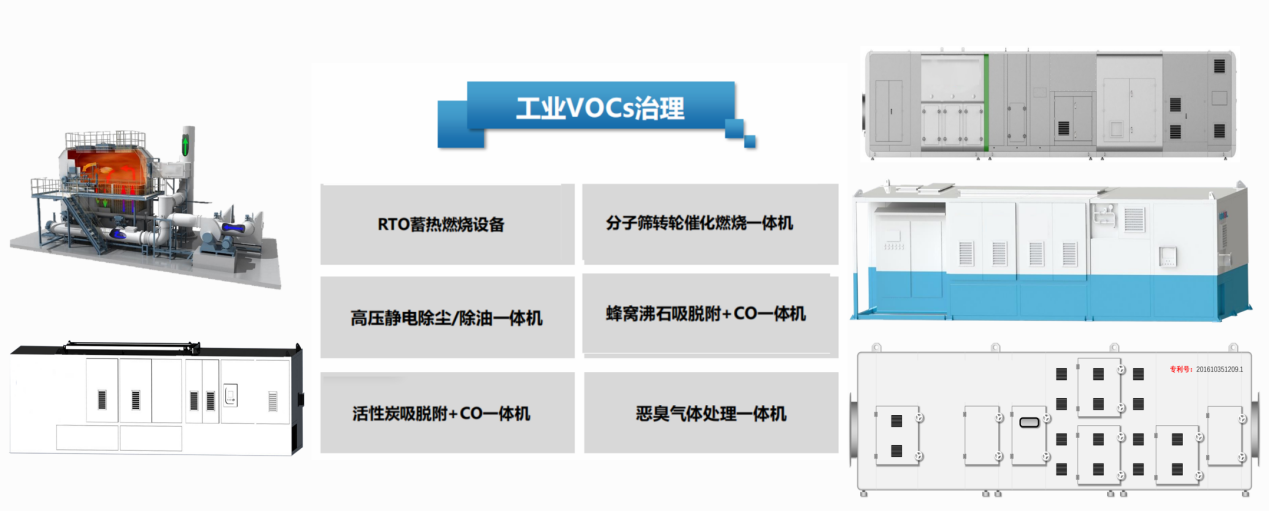
工业环保AI算法与数据要素应用研究中心(Industrial Environmental AI & Data Application Center)是一支聚焦“AI算法+数据要素”双轮驱动的工程型研发团队。中心面向国家“双碳”战略与绿色金融发展需求,致力于通过人工智能与数据智能技术,破解工业环保领域“治理难、监管难、融资贵、运维重”四大痛点,构建“精准治污、数据可信、算法智能、应用闭环”的工业环保智慧治理新范式。
中国 · 浙江 · 湖州 (湖州市西塞山路819号南太湖新区科技创新综合体B2幢)
电话:0572-2505726 传真:0572-2025581 Email:hizdyjy@126.com
Copyright © 2026 浙江大学湖州研究院 版权所有
官方微信公众号