






在酒店,送餐机器人被一级台阶拦住去路;在小区,巡逻机器人因楼梯无法跨楼层巡检……
尽管机器人已融入日常生活的诸多方面,但运动能力的限制依然成为拓展更多应用场景的瓶颈。
如何让机器人像人类一样跨越物理边界?一种创新性的结构设计与多模态融合方案给出了答案。
“从科研上讲,我们是解决了一个机器人的运动能力,就是Mobility,它怎么样从空间的一个点去运动到另一个点?怎么样能跨越环境中的障碍、能更好地在这个环境中建图,更好地规划,以及多机之间如何更好地协同。”

曹燕军是浙江大学湖州研究院集群机器人自主导航研究中心的项目负责人,也是飒远科技的创始人。为解决机器人的运动能力问题,他和团队对大众常见的产品类型进行了全新设计与工程改良。变形履带机器人就是其中之一。
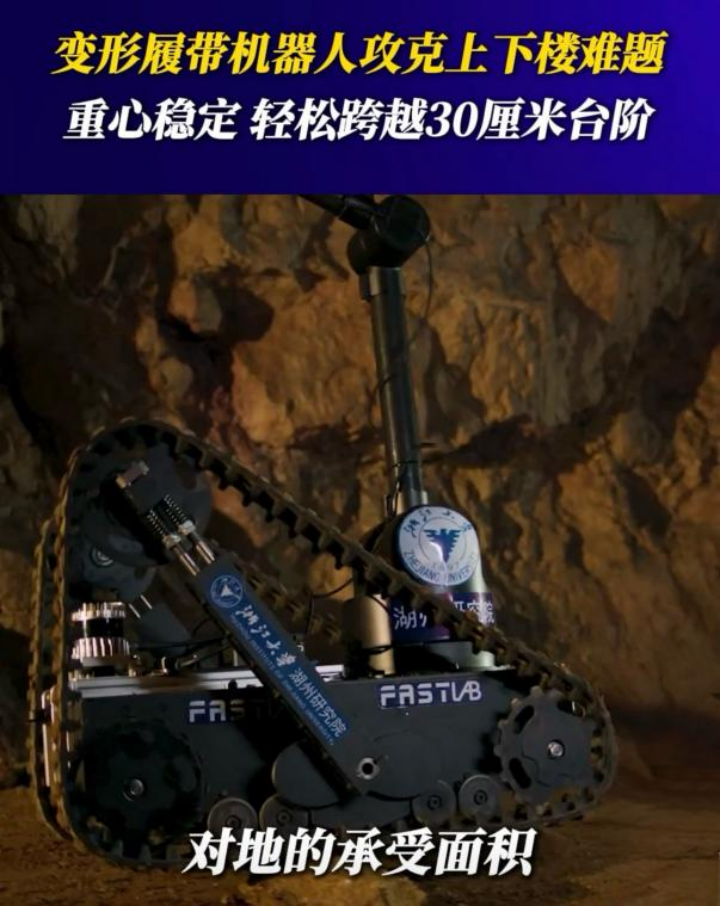
“一般履带机器人,可能就是一个底盘加了一副履带。只能说是它能适应一些简单凹凸地形。还有一些履带机器人,它可能会加一个摆臂去支撑自己跨越一些台阶。但是这两种机器人它们都很难做到一个上下楼的情况,因为机器人在上楼的时候,它的重心偏置的量太大了,导致前面的小摆臂的负载太大而无法工作。我们是创新地做了一种变形的履带,这个履带本身是结构可以变形的,我可以放到前头以及摆到后面,可以很大地提高对地形的适应能力,让重心始终在安全工作空间之内。像我们那个履带机器人可以安全地跨过这么高的这个茶几,跨个二三十厘米的台阶是轻轻松松的,在这过程中我们又始终保持了重心的稳定性。”
从实际应用上看,这款履带机器人实现了在较大载重情况下自如地上下楼梯;而从技术突破的角度看,以平行四边形结构解决履带张紧力控制难题,避免变形导致的履带脱落,这是研究团队最大的收获。曹燕军说,这项成果已经被机器人领域的顶级会议ICRA录用,并实现了小规模量产应用。
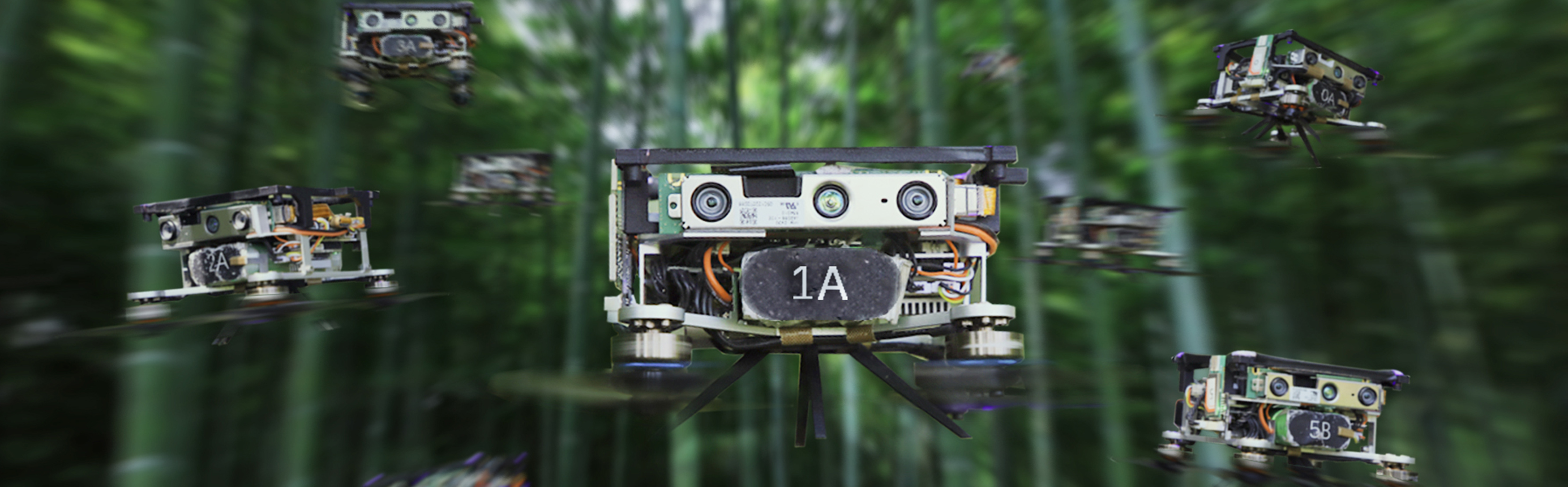
曹燕军团队还开发了一款全新的空地两栖机器人,它解决了机器人实际运用的另一大难题,续航能力。
“我们的空地两栖的无人机,从结构上看其实蛮简单的,就是一个四旋翼飞机,两边加了两个轮子。但是加完这两个轮子以后,机器人的续航能力得到了很大的提高。像传统的飞机可能只能飞个一二十分钟,二三十分钟,我们的飞机作业的时间可以轻轻松松地到一个多小时。其实空地两栖的这个机器人,在学术界其实一直都是很令人向往的,已经有很多年的历史,我们是第一个把这个东西去做成产品,真正去解决实际问题的这么一个企业。在这过程中,我们也不断地在做更新的研发,比如说我们解决飞机如何在地上跟空中更丝滑地切换,让我做任务的时候更顺滑。第二个我们还会去考虑,飞机怎么样让它在地上能做到一个更好的效率,更节能、使用更小的功率,然后更大的提高它的能效。”
简单说,这是一种空地协同的能源策略,用变形结构兼顾负载与越障,用空地互补解决能耗与灵活性。谈及这种类似变形金刚的设计理念,曹燕军颇为自豪,他认为这让机器人有效跨越了更多的物理边界,也催生了更为丰富的应用场景。
“机器人本身发展也发展估计很久了,尤其是工业机器,像工厂环境下这类的机械臂,可能已经发展到市场增量很少的一种状态了。所以现在我们的研究相当于是在不规则、不可控环境下的机器人的应用。从科研角度,我们还是要不断地推进研究,去创造更多的别人完全没有实现,甚至也没有去考虑的一些场景的事情。我们的目标就是把一些比较前沿的,对社会有用的一些的科技研发,转化成真正有生产力,能帮助社会实践更多价值的东西。”